SDK 3.5 Release Information
2022-07-29
Core Positioning – RTT
Time flies, and so do WiFi signals – and Fine Time Measurement (FTM) aka Round Trip Time (RTT) measures them. After our R&D team first demoed and evaluated RTT back in 2019, we thought the 802.11mc was a cool addition to our sensor fusion stack, but decided to drop it because none of our customers had WiFi Access Points supporting the new protocol. Since that, we’ve been busy working on other new features such as POIs, cart mode, indoor-outdoor detection, and most importantly AR Wayfinding and AR Objects.
Today, IndoorAtlas’ world leading sensor fusion positioning technology got even stronger by seamlessly integrating with 802.11mc (RTT). The new feature is available through the new SDK 3.5 and to benefit from it, you’d deploy and use IndoorAtlas SDK just like before – no additional hassle.
The potential user base of RTT is growing fast, with 802.11mc supported by many Zebra handheld computers, other high end Android smartphones as well as Aruba access points. With RTT integrated, IndoorAtlas sensor fusion now utilizes:
- Geomagnetic field anomalies
- BLE beacons and WiFi Access Points with Bluetooth radio
- WiFi RSSI
- WiFi RTT (802.11mc)
- Barometric information
- Pedestrian dead-reckoning (PDR)
- Visual-inertial odometry (VIO)
- Any external source of position
While a single source of information such as RTT is sometimes accurate, IndoorAtlas sensor fusion has two major advantages:
-
- Multiple signal sources bring robustness: when one signal would give inaccurate location, the others compensate. For example, access point setup may be dense in one area, sparse in another area.
-
- Due to utilising all available signals, IndoorAtlas can enable accurate positioning in virtually any building – often even the same customer has different network infrastructure in different locations.
Core Positioning – Low Power Beacon Fusion
Above we listed some of the benefits of IndoorAtlas sensor fusion – one of the most important for customers is that with sensor fusion they don’t need a dense AP or beacon setup to benefit from our typical 2m to 5m positioning accuracy. However, sometimes customers ask: “Can we have an even more accurate position on this important area?”
To this end, the new SDK 3.5 introduces Low Power Beacon Fusion. This feature allows our customers to, at the same time, benefit from cost efficient deployment with sparse radio infrastructure and from accurate detection of specific locations: e.g. a desk or a meeting room in an office setting, or a packaging area in logistics.
To use the feature, beacon(s) is set up to transmit at a low power (typically -40dBm) and is marked in IndoorAtlas Beacon Planner as a Low Power Beacon. This makes IndoorAtlas sensor fusion treat it differently from other radio signal sources – namely allowing position estimates to converge to the location of the beacon, when the signal of the beacon is reliably heard. IndoorAtlas SDK handles this under the hood and the application receives position estimates normally. Note also that this feature can be combined with our Geofencing feature, to get high accuracy enter/exit events.
Discovery Mode
SDK 3.5 also introduces a new feature called Discovery Mode. In this first revision of the new mode, we focused on facilitating developers’ use of IndoorAtlas SDK’s built-in data storage and upload capabilities. The opt-in data storage feature stores position data to IndoorAtlas cloud, allowing developers to fetch it though the Data API. Typically the feature is used in professional applications running on the device at all times e.g. in retail and logistics, enabling heatmaps and other data analytics.
In short, the new mode enables running IndoorAtlas positioning all the time when traversing in and out of IndoorAtlas-deployed buildings. Discovery Mode detects when the device is far from all deployed venues on your IndoorAtlas account and automatically stops storing positioning data to the cloud. The application on the user’s device still receives the platform location updates in real time through IndoorAtlas SDK, enabling smooth indoor-outdoor transitions and use cases requiring outdoor positioning. When the device gets near a deployed venue, data storage to the cloud continues seamlessly, and IndoorAtlas positioning kicks-in according to the existing indoor-outdoor detection feature.
IndoorAtlas Platform
On the platform side, IndoorAtlas now enables deploying positioning without fingerprinting. This feature enables lightning-fast deployment of IndoorAtlas positioning to any building where the location of the BLE beacons or WiFi APs are available. This feature gives strong support for the 802.11mc integration, while deploying through fingerprinting works just as well. The new feature is available through the IndoorAtlas Beacon Planner.
Our Web App CMS now allows you to place images into POIs. The users will be able to see the images when navigating using AR or just exploring the environment through the phone’s camera. This feature completes our unique location-based AR which fuses iOS & Android platform AR capabilities with IndoorAtlas indoor positioning, making it very easy to create location-based AR apps.
The following images show how to place AR POI images and how they look like through the phone’s camera.
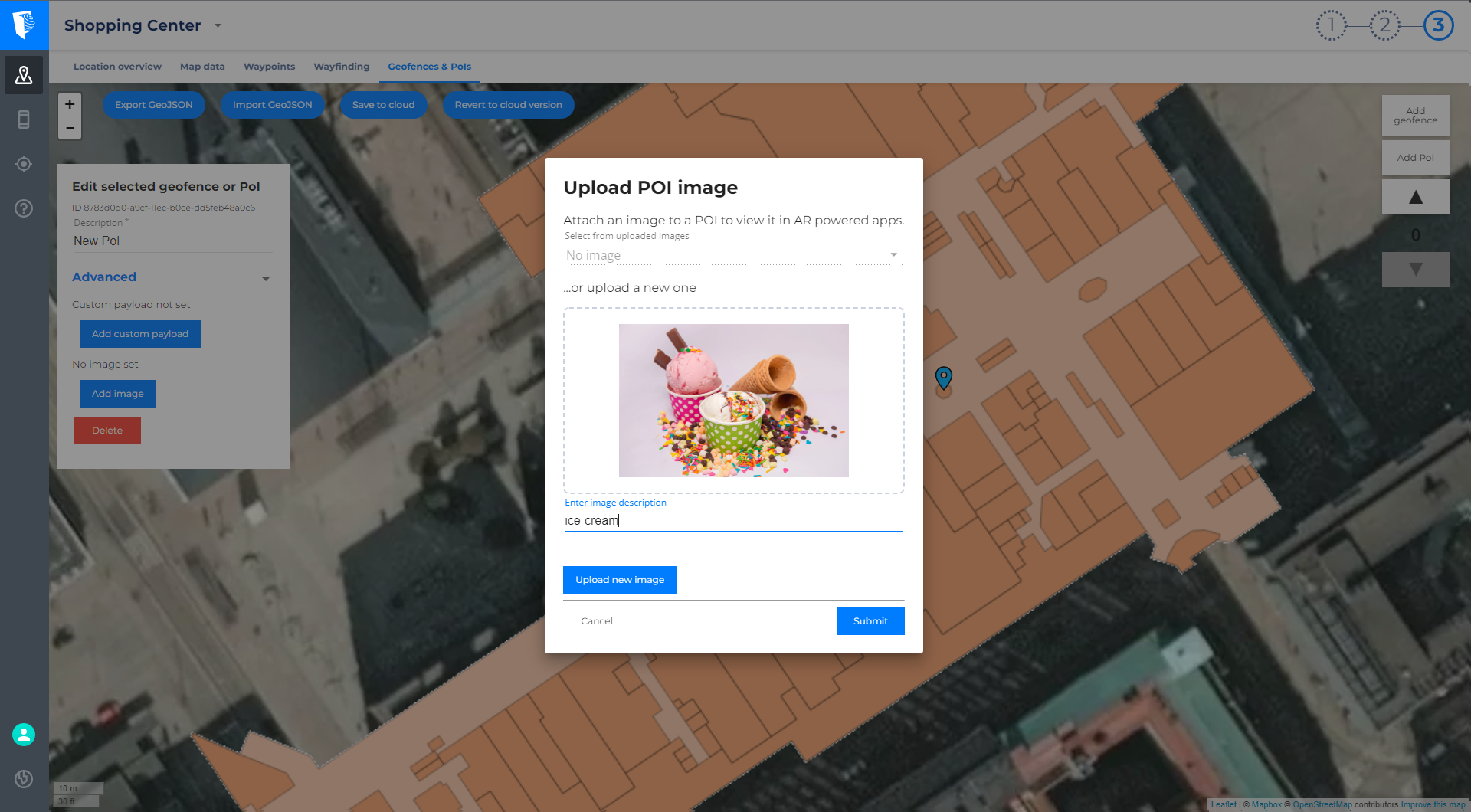
Placing AR POI Images

Viewing AR POI Image